Название: StepStickA4988 Драйвер шагового двигателя
Упаковочный лист
3 шт. * A4988 (2A)
3 шт. * теплоотвод
ВВ настоящее времяРасчет: i = vref/0,8
Потенциометр обладает тремя контактами, напряжение Vref с мультиметр тестовых для 4988 направление штифта, сила тока может быть скорректировано с помощью регулятора потенциометр. Это увеличит по часовой стрелке, противоположности, уменьшить против часовой стрелки.
![11]()
Преимущество:
1. Высокое качество 2OZ Медный заменяет с использованием дешевле 1OZ PCB.
2. Если вам нравится пчелы Протестировано один за другим и отличную работу.
3. Свободный алюминиевый жаростойкий корпус.
4. Припоя overgild иглы и новейший чип.
Параметры:
Размер: 1.5mmX2mm (для приготовления пищи на пандусы, ultimaker или других совместимых плат)
Драйвер ток: 2A (это самое лучшее для того чтобы установить теплоотвод)
Microstep: 1,1 / 2,1 / 4,1 / 8,1 / 16
Производственный процесс: сделанный SMT, более высокий выход, Отличная стабильность.
Использование на:
1. 3dprinter, фрезерный станок с ЧПУ, станок для резьбы по дереву и т. д.
2. Поддержка 3D принтер с Prusa Mendel, ultimaker, printbot, makerbot, и т. д.
3. Обратитесь к Arduino код прямо приводной двигатель.
Особенности:
1. Подходит для Драйвер шагового двигателя менее чем 8V ~ 35V, 2A
2. Простой microstep и направление интерфейс управления
3. Не могли бы Вы отрегулировать Максимальный выходной ток управляя потенциометр для того, чтобы получить более microstep
4. Обнаружение и выборЗатуханиеРежим автоматической в настоящее время.
5. Тепловое отключение цепи, пониженного напряжения блокировки, кроссовера по току
6. Хорошая защита на земле и защита от короткого замыкания
![2]()
Если вы используете A4988 на 3dprinter, необходимо полное модуль схемы:
Arduino 2560 процессор core-доска
Ultimaker v1.5.7 основная плата управления
A4988 Драйвер шагового двигателя модуль (одиночная головка: 4 шт.; Двойная головка: 5 шт)
ЖК-контроллер (или sd-картой офлайн-печать)
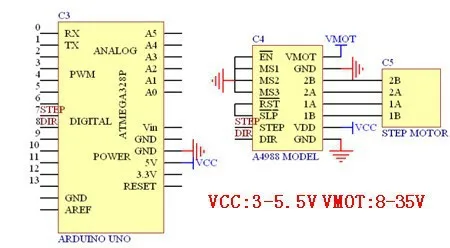
Управление A4988 непосредственно с помощью Arduino:
Вы можете управлять A4988 с помощью UNO для того чтобы контролировать шаг и Дир
![3]()
Взаимосвязи между MS1, MS2, MS3:
![11]()
Тестовый код:
Int dirpin = 8;
Int stepperpin = 7;
Настройка пустоты ()
{PinMode (dirpin, выход);pinMode (stepperpin, выход);} долл. США
Силы шаг (логический Дир, int шагов)
{DigitalWrite (dirpin, Дир);
Задержка (50);
Для (в том числе i = 0;i <шагов; i + +)
{DigitalWrite (stepperPin, HIGH);
DelayMicroseconds (800);
DigitalWrite (stepperPin, LOW);
Delaymicroseconds (800); } долл. США
Пустая петля ()
{Шаг (true,1600);
Задержка (500);
Шаг (накладные, 1600*5);
Задержки (500);} долл. США