Внешняя DSLR DV камера видеокамера Микрофон для съемки интервью Canon Nikon|Комплекты
3 790,96 руб.

Новое поступление
Характеристики
*Текущая стоимость 3 412,55 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Apr-04-2026 | 4060.77 руб. | 4263.68 руб. | 4161.5 руб. |
| Mar-04-2026 | 4026.26 руб. | 4227.14 руб. | 4126.5 руб. |
| Feb-04-2026 | 3378.90 руб. | 3547.62 руб. | 3462.5 руб. |
| Jan-04-2026 | 3958.56 руб. | 4156.38 руб. | 4057 руб. |
| Dec-04-2025 | 3446.2 руб. | 3618.77 руб. | 3532 руб. |
| Nov-04-2025 | 3890.37 руб. | 4085.46 руб. | 3987.5 руб. |
| Oct-04-2025 | 3856.48 руб. | 4049.24 руб. | 3952.5 руб. |
| Sep-04-2025 | 3821.93 руб. | 4012.39 руб. | 3916.5 руб. |
| Aug-04-2025 | 3787.93 руб. | 3976.33 руб. | 3881.5 руб. |
Описание товара



|
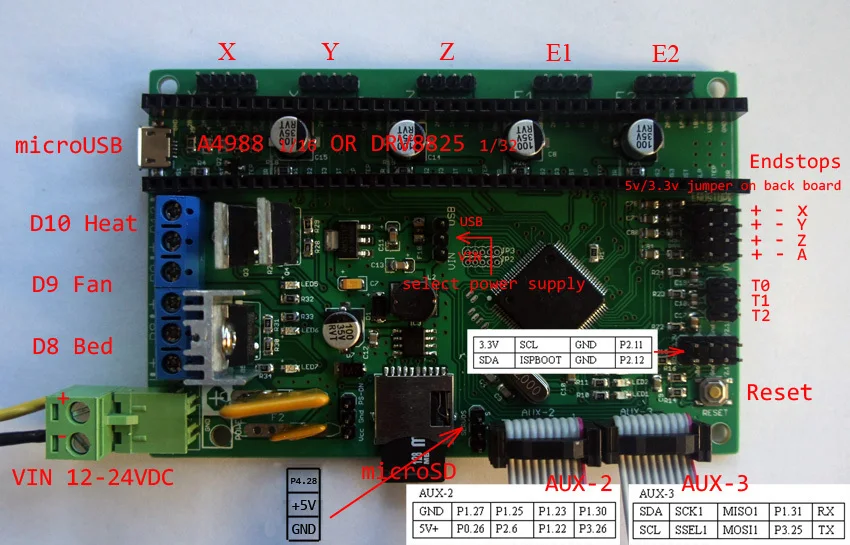
ОбразецConfig.txt:
# Примечания не должны превышать 132 символов # Конфигурация модуля робота: общее управление движением g-кодов и нарезка в ходы Default_feed_rate 4000 # частота по умолчанию (мм/минута) для движения G1/G2/G3 Default_seek_rate 4000 # частота по умолчанию (мм/мин) для движения G0 Mm_per_arc_segment 0,5 # дуги разрезаются на сегменты (линии), это длина для # Это сегментами. Меньшие значения означают большее разрешение, # Более высокие значения означают более быстрое вычисление # Mm_per_line_segment 0,5 # линии могут быть разрезаны на сегменты (не полезны с картезианскими # Координаты роботов). Delta_segments_per_second 100 # для deltas только такой же, как в Marlin/Delta, установите до 0, чтобы отключить # И использовать mm_per_line_segment # Arm Конфигурация решения: Cartesian robot. Преобразует мм положения в шаговые положения Arm_solution linear_delta # выбирает решение delta arm Alpha_steps_per_mm 100 # шаги на мм для alpha stepper Beta_steps_per_mm 100 # шагов на мм для бета-шагового Gamma_steps_per_mm 100 # шагов на мм для гамма шагового Arm_length 196,8 # это длина руки от шарнира до шарнира Arm_radius 101,9 # это горизонтальное расстояние от петли до петли # Когда эффектор центрирован # Планировщик конфигурации модуля: посмотрите вперед и ускорение конфигурации Planner_queue_size 32 # не меняйте это, если вы точно не знаете, что делаете Ускорение 3000 # ускорение в мм/секунду. Acceleration_ticks_per_second 1000 # количество раз в секунду скорость обновляется Junction_deviation 0,05 # похож на старые "max_jerk" в миллиметрах, # Более низкие значения означают более тщательную работу, более высокие значения означают # Быстрее и еще больше рывок # Minimum_planner_speed 0,0 # устанавливает минимальную скорость планировщика в мм/сек # Шаговый модуль конфигурации Microseconds_per_step_pulse 1 # длительность импульсов шагового двигателя, в микросекундах Minimum_steps_per_minutes 1200 # никогда не шагайте медленнее этого Base_stepping_frequency 100000 # Базовая частота для шага, выше дает плавное движение # Пределы скорости картезианской оси X_axis_max_speed 30000 # мм/мин Y_axis_max_speed 30000 # мм/мин Z_axis_max_speed 30000 # мм/мин # Шаговый модуль шпильки (порты, и pin-код номера, добавляя "!» на номер будут инвертировать ПИН-кода) Alpha_step_pin 2,0 # Pin для шагового сигнала alpha Alpha_dir_pin 0,5 # Pin для Альфа шагового направления Alpha_en_pin 0,4 # Pin для alpha enable pin Alpha_max_rate 30000,0 # мм/мин Beta_step_pin 2,1 # Pin для Бета шагового сигнала Beta_dir_pin 0,11 # Pin для Бета шагового направления Beta_en_pin 0,10 # Pin для beta enable Beta_max_rate 30000,0 # мм/мин Gamma_step_pin 2,2 # Pin для шагового сигнала gamma Gamma_dir_pin 0,20 # Pin для гамма шагового направления Gamma_en_pin 0,19 # Pin для включения гамма Gamma_max_rate 30000,0 # мм/мин # Конфигурация последовательной связи (скорость передачи по умолчанию до 9600, если не определена) Uart0.baud _ rate 115200 # скорость передачи данных для аппаратного последовательного порта по умолчанию # Конфигурация последовательной связи (скорость передачи данных по умолчанию до 9600, если не определена) Serial.baud_rate 115200 # скорость передачи данных для последовательного порта по умолчанию Second_usb_serial_enable false # это позволяет второму последовательному порту usb (иметь оба pronterface # И Подключение терминала) Leds_disable false # disable использование светодиодов после загрузки конфигурации # Msd_disable true # отключите MSD (USB SDCARD), когда Установите значение true # Disable_msd Размер Dfu_enable Ложные # Экструдер Модуль конфигурации Экструдер. hotend. Включите true # активировать ли экструдер модуль вообще. Все конфигурации игнорируются, если false Экструдер. hotend.steps_per_mm 506 # шагов на мм для экструдера шагового Экструдер. Hotend.de fault_feed_rate 600 # скорость по умолчанию (мм/мин) для ходов, где движется только экструдер Экструдер. hotend. Ускорение 500 # ускорение шаговый двигатель, как 0,6, произвольных соотношение Экструдер. hotend.max_speed 200 # мм/с Экструдер. hotend.step_pin 2,3 # Pin для экструдера шаг сигнала Экструдер. hotend.dir_pin 0,22 # Pin для экструдера dir сигнала Экструдер. hotend.en_pin 0,21 # Pin для экструдера включить сигнал # Экструдер офсетная печать # Экструдер. hotend.x_offset 0 # x смещение от происхождения в мм # Экструдер. hotend.y_offset 0 # y смещение от происхождения в мм # Экструдер. hotend.z_offset 0 # z смещение от происхождения в мм # Сброс настроек прошивки при использовании G10/G11, это настройки по умолчанию, если они не указаны, необходимо определить для каждого экструдера, если не использовать настройки по умолчанию # Экструдер. hotend.retract_length 3 # retract length in mm # Экструдер. hotend.retract_feedrate 45 # retract fedrate в мм/сек # Экструдер. hotend.retract_recover_length 0 # Дополнительная длина для восстановления # Экструдер. hotend. Retract_recover_fedrate 8 # recover fedrate в мм/сек (должно быть меньше, чем retract fedrate) # Экструдер. hotend.retract_zlift_length 0 # zlift on retract in mm, 0 отключается # Экструдер. hotend.retract_zlift_feedrate 6000 # zlift feedrate в мм/мин (Примечание мм/мин не мм/сек) # Delta_текущий 1,5 # первый экструдер шаговый двигатель тока # Второй пример конфигурации модуля экструдера Экструдер. Hotend2.включите false # активировать ли экструдер модуль вообще. Все конфигурации игнорируются, если false Экструдер. hotend2.steps _ per_mm 140 # шаги на мм для экструдера шагового Экструдер. Hotend2.de fault_feed_rate 600 # скорость по умолчанию (мм/мин) для ходов, где движется только экструдер Экструдер. hotend2.acceleration 500 # ускорение шаговый двигатель, как 0,6, произвольных соотношение Экструдер. hotend2.max _ скорость 50 # мм/с Экструдер. hotend2.step _ pin 2,8 # Pin для экструдера шаг сигнала Экструдер. hotend2.dir _ pin 2,13 # Pin для экструдера dir сигнала Экструдер. hotend2.en _ pin 4,29 # Pin для экструдера сигнала включения # Экструдер. hotend2.x _ смещение 0 # x смещение от происхождения в мм # Экструдер. hotend2.y _ смещение 25,0 # y смещение от происхождения в мм # Экструдер. hotend2.z _ смещение 0 # z смещение от происхождения в мм # Epsilon_текущий 1,5 # второй экструдер шаговый двигатель тока # Лазерный модуль конфигурации Laser_module_enable false # активировать ли лазерный модуль вообще. Все настройки # Игнорируется, если false. # Laser_module_pin 2,5 # этот pin будет PWMed для управления лазером. Только в том случае, P2.0 - P2.5 # Может использоваться, так как лазер требует аппаратного PWM # Laser_module_max_power 0,8 # это максимальный рабочий цикл, который будет применен к лазеру # Laser_module_tickle_power 0,0 # этот рабочий цикл будет использоваться для перемещения, чтобы сохранить лазер # Активный без фактического горения # Laser_module_pwm_pwm_period 20 # это устанавливает частоту pwm как период в микросекундах # Hotend конфигурация контроля температуры Temperature_control.hotend. Включите true # активировать ли этот («hotend») модуль вообще. # Все конфигурации игнорируются, если false. Temperature_control.hotend.thermistor_pin 0,23 # Pin для термистора для чтения Temperature_control.hotend.heater_pin 2,4 # Pin, который контролирует нагреватель Temperature_control.hotend.thermistor EPCOS100K # см # Temperature_control.hotend. beta 4066 # или установите бета-значение Temperature_control.hotend.set_m_code 104 # Temperature_control.hotend.set_and_wait_m_code 109 # Temperature_control.hotend.designator T # # Temperature_control.hotend.p_factor 13,7 # постоянно устанавливайте значения PID после автоматического pid # Temperature_control.hotend.i_factor 0,097 # # Temperature_control.hotend.d_factor 24 # # Temperature_control.hotend.max_pwm 64 # max pwm, 64 является хорошим значением при вождении резистора 12 В с 24 В. # Hotend2 конфигурация контроля температуры Temperature_control.hotend2.включите false # активировать ли этот («hotend») модуль вообще. # Все конфигурации игнорируются, если false. Прочтите 0,24 # Pin для термистора Temperature_control.hotend2.heater_pin 2,7 # Pin, который контролирует нагреватель Temperature_control.hotend2.thermistor EPCOS100K # # Temperature_control.hotend2.beta 4066 # или установите бета-значение # Temperature_control.hotend2.set_m_code 884 # # Temperature_control.hotend2.set_and_wait_m_code 889 # # Temperature_control.hotend2.designator T1 # # Temperature_control.hotend2.p_factor 13,7 # постоянно устанавливайте значения PID после автоматического pid # Temperature_control.hotend2.i_factor 0,097 # # Temperature_control.hotend2.d_factor 24 # # Temperature_control.hotend2.max_pwm 64 # max pwm, 64 является хорошим значением при вождении резистора 12 В с 24 В. Temperature_control.bed.enable накладные # Temperature_control.bed.thermistor_pin 0,25 # Temperature_control.bed.heater_pin 2,5 # Temperature_control.bed.thermistor EPCOS100K # см # Temperature_control.beda. beta 4066 # или установите beta value # Temperature_control.bed.set_m_code 140 # # Temperature_control.bed.set_and_wait_m_code 190 # # Temperature_control.bed.designator B # # Temperature_control.bed.bang_bang false # Установите значение true, чтобы использовать контроль взрыва, а не PID # Temperature_control.bed.hysteresis 2,0 # установите температуру в градусах C для использования в качестве гистерезиса # При использовании bang # Модуль переключателя для управления вентилятором Переключатель. Вентилятор. Включить true # Переключатель. fan.input_on_command M106 # Переключатель. fan.input_off_command M107 # Переключатель. fan.output_pin 2,7 # if fan to D9 set 2,7 или fan1 0,26 Переключатель. fan.output_type pwm # pwm выходной набор с параметром S в input_on_comand # Switch. fan.max_pwm 255 # set max pwm для pin по умолчанию 255 # Switch. misc. Включить true # # Switch. misc.input_on_command M42 # # Switch. misc.input_off_command M43 # # Switch. misc.output_pin 2,4 # # Switch. misc.output_type digital # просто ВКЛ или ВЫКЛ pin # Автоматическое переключение переключателя При указанной температуре. Различные из них могут быть заданы для контроля различных температур и переключения разных параметров # Полезно включить вентилятор или водяной насос для охлаждения hotend # Temperatureswitch. hotend. Включить true # # Temperatureswitch.hotend.de signator T # Первый символ регулятора температуры для использования в качестве датчика температуры для контроля # Temperatureswitch. hotend.switch misc # выберите, какой переключатель использовать, совпадает с именем определенного переключателя # Temperatureswitch. hotend.threshold_temp 60,0 # температура для включения (при подъеме) или выключения выключателя # Temperatureswitch. hotend.heatup_poll 15 # poll heatup с интервалами 15 сек # Temperatureswitch. hotend.cooldown_poll 60 # poll cooldown с интервалами 60 сек # Модуль переключателя для управления шпинделем # Переключатель. Шпиндель. Включить false # # Концевики Endstops_enable true # модуль endstop включен по умолчанию и может быть отключен здесь Delta_homing true # заставляет все три оси дома в одно и то же время, независимо от # Что указано в G28 Alpha_min_endstop nc # Alpha_max_endstop 1,24 ^ # add! Для инвертирования вытяжки, Если переключатель не заземлен Alpha_homing_direction home_to_max # Home up Alpha_max 0 # Beta_min_endstop nc # Beta_max_endstop 1,26 ^ # Beta_homing_direction home_to_max # Beta_max 0 # Gamma_min_endstop nc # Gamma_max_endstop 1,28 ^ # Gamma_homing_direction home_to_max # Gamma_max 237 # Alpha_fast_homing_rate_mm_s 200 # homing feedrates в мм/секунду Beta_fast_homing_rate_mm_s 200 # Gamma_fast_homing_rate_mm_s 200 # Alpha_slow_homing_rate_mm_s 20 # Beta_slow_homing_rate_mm_s 20 # Gamma_slow_homing_rate_mm_s 20 Alpha_homing_retract_mm 5 # расстояние возврата/отскока после дома в мм Beta_homing_retract_mm 5 # разъемная застежка-молния Gamma_homing_retract_mm 5 # разъемная застежка-молния Alpha_trim-5 # программное обеспечение для alpha stepper endstop (в мм) Beta_trim-5 # программное обеспечение для бета-шагового торца (в мм) Gamma_trim-5 # программное обеспечение для гамма шагового торца (в мм) # Endstop_debounce_count 100 # не комментируйте, если вы получаете шум на концах # Дополнительный Z зонд Zprobe. Включите true # set to true, чтобы включить zprobe Zprobe. probe_pin 1,29 ^ # контактный зонд прилагается, если NC удалит! Zprobe. slow_feedrate 5 # мм/сек скорость подачи зонда # Zprobe.de bounce_count 100 # set if noisy Zprobe. Fast_fedrate 100 # move fedrate мм/сек Zprobe. probe_height 5 # сколько выше кровати, чтобы начать зонд # Gamma_min_endstop nc # нормально 1,28. Изменить на nc для предотвращения коллизии, #, Связанный с zprobe, с стратегией выравнивания для использования # Leveling-strategy.delta-calibration.enable true # базовая калибровка Дельта # Leveling-strategy.delta-calibration.radius 100 # радиус зонда # Кнопка паузы # Pause_button_enable true # кнопка паузы enable # Pause_button_pin 2,12 # кнопка паузы. По умолчанию является P2.12 # Kill_button_enable false # set to true, чтобы включить кнопку kill # Kill_button_pin 2,11 # kill button pin. По умолчанию такая же, как кнопка паузы 2,12 (2,11-еще один хороший выбор) # Панель Панель. Включите true # set to true, чтобы включить код панели Панель. С ЖК-дисплеем Viki2 # St7565_glcd Панель. spi_channel 0 # spi channel для использования; GLCD EXP1 Pins 3,5 (MOSI, SCLK) Панель. spi_cs_pin 1,22 # spi чип выбор; GLCD EXP1 Pin 4 Панель. a0_pin 2,6 Панель. encoder_a_pin 4,28! ^ # кодер; GLCD EXP2 pin 3 Панель. encoder_b_pin 1,27! ^ # кодер; GLCD EXP2 pin 5 Панель. click_button_pin 3,26! ^ Панель. buzz_pin 1,30 # Panel. pause_button_pin 1,23! ^ # kill/pause ; GLCD EXP2 Pin 8 Панель. Заднего хода -1 шт. Панель. external_sd true # Установите значение true, если на панели есть дополнительная sdcard Панель. external_sd.spi_channel 0 # set spi channel sdcard включена Панель. external_sd.spi_cs_pin 0,16 # набор чипов spi выберите для sdcard Панель. external_sd.sdcd_pin 3,25! ^ # sd-сигнал обнаружения (Установите в nc, если sdcard не обнаруживается) # Panel. button_pause_pin 2,10! ^ # kill/pause ; GLCD EXP2 Pin 8 # Panel. button_pause_pin 1,23! ^ # kill/pause ; GLCD EXP2 Pin 8 # Panel. back_button_pin 1,23! ^ # Кнопка возврата; GLCD EXP2 Pin 8 или Панель. Контраст 19 # Контакты, используемые с другими панелями # Панель. up_button_pin 0,1! # кнопка вверх при использовании # Panel. down_button_pin 0,0! # кнопка вниз при использовании # Panel. click_button_pin 1,22! # нажмите кнопку, если используется Панель. menu_offset 0 # некоторые панели понадобится 1 здесь Панель. encoder_resolution 4 Панель. alpha_jog_feedrate 6000 # x пробежка федрат в мм/мин Панель. beta_jog_feedrate 6000 # y jogging feedrate в мм/мин Панель. gamma_jog_feedrate 6000 # z jogging feedrate в мм/мин Панель. hotend_temperature 185 # temp для установки hotend_temperature при выборе Панель. bed_temperature 60 # temp для установки кровати, когда выбран Предварительный нагрев # Пример пользовательской записи меню, которая появится в пользовательской записи. # NOTE _ преобразуется в пробел в меню и командах, | Используется для разделения нескольких команд Custom_menu.power_on.enable true # Custom_menu.power_on.name Power_on # Custom_menu.power_on.command M80 # Custom_menu.power_off.enable true # Custom_menu.power_off.name Power_off # Custom_menu.power_off.command M81 # Custom_menu.fan_on.enable true # Custom_menu.fan_on.name Fan_on # Custom_menu.fan_on.command M106 # Custom_menu.fan_off.enable true # Custom_menu.fan_off.name Fan_off # Custom_menu.fan_off.command M107 # # Требуется только на гладкой доске Currentcontrol_module_enable накладные # Return_error_on_unhandled_gcode накладные # # Модуль переключателя для управления Сервоприводом Переключатель. Сервопривод. Включить true # Переключатель. Сервопривод. input_on_command M280 # M280 S7.5 будет промежуточным Переключатель. servo. Input_off_comm281 # такой же, как M280 S0 0% рабочий цикл, эффективно выключается Переключатель. Сервопривод. output_pin 1,23 # должен быть PWM способным контактом Переключатель. Сервопривод. output_type hwpwm # H/W pwm выходной набор с параметром S в input_on_comand # Switch. servo.pwm_period_ms 20 # установить период до 20 мс (50 Гц) по умолчанию 50 Гц
Смотрите так же другие товары: