
Материнская плата для Mindray BC1800bc2900bc3000bc3200 аксессуары кровяных элементов
26 506,05 руб.
Новое поступление
Характеристики
*Текущая стоимость 35 722,29 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Apr-06-2026 | 42509.81 руб. | 44634.26 руб. | 43571.5 руб. |
| Mar-06-2026 | 42152.42 руб. | 44260.33 руб. | 43206 руб. |
| Feb-06-2026 | 35365.91 руб. | 37133.73 руб. | 36249 руб. |
| Jan-06-2026 | 41438.82 руб. | 43510.14 руб. | 42474 руб. |
| Dec-06-2025 | 36079.53 руб. | 37883.68 руб. | 36981 руб. |
| Nov-06-2025 | 40723.96 руб. | 42759.99 руб. | 41741 руб. |
| Oct-06-2025 | 40366.26 руб. | 42384.81 руб. | 41375 руб. |
| Sep-06-2025 | 40009.22 руб. | 42009.17 руб. | 41009 руб. |
| Aug-06-2025 | 39651.99 руб. | 41634.13 руб. | 40642.5 руб. |
Описание товара





Мы стремимся построить Многофункциональный комплект разработки, который может быть использован в качествеНовейшая BLE4.1 Bluetooth Беспроводная платформа для разработки системы позиционирования в реальном времениЕго также можно использовать в качествеНизкая мощность Bluetooth CC26xx макетная платаОн также может быть идеально интегрирован нашей аппаратной и программной системой.Платформа развития Интернета вещей!
Встроенные в наш уникальный механизм определения местоположения в реальном времени, мы непосредственно рассчитаем значения координат выходного позиционирования непосредственно на уровне аппаратной прошивки.
Для того, чтобы облегчить применение и разработку дизайна системы позиционирования в реальном времени (RTLS) в применении самых передовых высокопроизводительных беспроводных радиочастотных технологий, Wuhan Jing Yang technology Co., ltd. стремится предоставить BLE4.1 Bluetooth беспроводную систему позиционирования в реальном времени для беспроводного позиционирования в реальном времени на основе схемы Bluetooth. Его Превосходная производительность, отличное соотношение цены и качества, имеет выдающиеся конкурентные преимущества в области Интернета вещей.
В комплекте разработчика используется SoC чип CC2640 TI Совместимый Bluetooth 4,1 BLE протокол. Он работает на ISM беспроводном диапазоне Two4GHz, интегрирует высокую производительность и низкую мощность RF Bluetooth Функциональные блоки и имеет процессор с ядром ARM Cortex-M3. Полностью совместим с BLE Bluetooth 4, может общаться с такими чипами, как CC2540 / CC2541, но энергопотребление составляет всего 1/3 серии CC254x, и скорость была значительно улучшена.
Решение BLE4.1 на основе этого одного чипа. Используя самую передовую технологию ультра низкой мощности, технологию обнаружения интенсивности сигнала RSSI, технологию зондирования iBeacon, технологию автоматической коррекции ошибок и Встроенный интегрированный двигатель позиционирования в реальном времени, координаты местоположения рассчитываются непосредственно на уровне аппаратной прошивки. Вся система разработана с высоким коэффициентом усиления, безопасности и надежности и анти-помех RF цепи. Он может работать непрерывно и отвечать функциональным требованиям плохой окружающей среды. В то же время, он имеет различные интерфейсы связи, легко отлаживать в Интернете, и может быть дополнительно разработан два раза через расположение покрытия компоновки беспроводной сети, подходит для различных сценариев решения о местоположении. Модуль цепи в этом наборе использует высокую плотность и небольшой объем поверхностный монтаж SMD, который имеет характеристики микро-мощности, миниатюрность, дальность передачи/приема, И отвечает потребностям различных типичных сцен приложений.
Набор разработки включает в себя ряд программного обеспечения, оборудования и инструментов, чтобы показать, как использовать нашу технологию BLE4.1 для достижения функций местоположения.

Функция позиционирования включает в себя два аспекта:
A) диапазон от мобильного узла (цели).
B) расположение мобильного узла (цели).
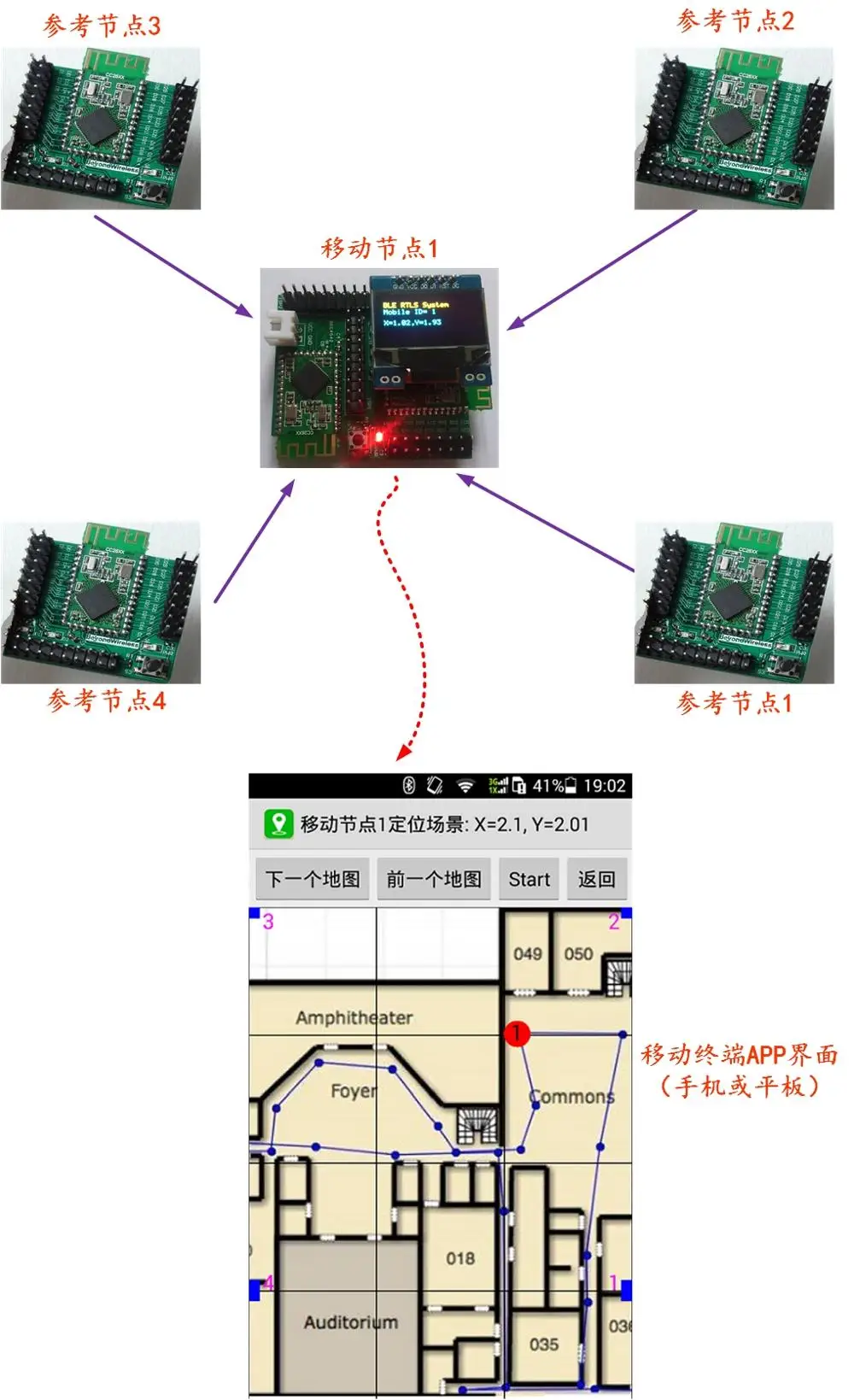
Эта система позиционирования устанавливает четыре опорных узла BLE, известны конкретные координаты положения четырех опорных узлов BLE, а мобильный узел BLE в своем диапазоне сцен расположен через беспроводную связь Bluetooth BLE4.1. Опорный узел непрерывно запускает сигнал BLE радиочастоты, который описывает свое положение во внешнем мире; Мобильный узел получает сигнал BLE и получает силу принимающего сигнала (RSSI) связи между собой и каждым опорным узлом путем обнаружения, И получает значение координат положения своего собственного местоположения в аппаратном обеспечении реального времени и передает пакет данных о местоположении на мобильный терминал BLE. Конец (смартфон, плоская Накладка и т. д.). Демонстрационное программное обеспечение для позиционирования запускается на мобильном терминале BLE. Пользователь может установить рабочие параметры системы позиционирования на программном интерфейсе приложения, наблюдать за значением координат положения в реальном времени мобильного узла, А также может просматривать конкретное местоположение и отслеживать трек мобильного узла относительно опорного узла, чтобы реализовать полную функцию позиционирования.

1) принятие решения BLE4.1 на основе высокоскоростного встроенного SOC беспроводного чипа нового поколения TI компании CC26xx с помощью серии основных функций, таких как сверхнизкое энергопотребление, согласование радиочастот, RSSI обнаружения и позиционирования двигателя, и так далее, мы обеспечиваем полное открытое решение местоположения с высокой стоимостью производительности.
2.Встроенный интегрированный уникальный локационный двигатель в режиме реального времени, непосредственно рассчитать значение выходного позиционирования непосредственно на уровне аппаратной прошивки.
3) модули питания каждого узла оборудования могут работать независимо. Все основные функциональные интерфейсы IO понятны, удобны для функциональной отладки, оценки тестирования и разработки продукта; Без какого-либо пола, он может использоваться как независимый модуль или системная интеграция, И быстро внедрить в Инженерную разработку.
4) путем установки и позиционирования демонстрационного программного обеспечения приложения на мобильном терминале (смартфон, плоская панель и т. д.), координаты положения мобильных узлов в реальном времени можно просматривать в режиме реального времени, И конкретное местоположение и изменение трека мобильных узлов относительно опорных узлов можно просматривать графическим способом, И рабочие параметры системы позиционирования могут быть настроены.
5) опорный узел и мобильный узел работают при низком энергопотреблении, аккумулятор удобен в замене, а рабочее время продолжительное.
6) сочетание точного позиционирования (режим координат) с позиционированием на уровне регионов (восприятие диапазона), лучший метод определения местоположения выбирается автоматически, а эффект позиционирования отображается графически.
7) Усовершенствованный алгоритм определения интенсивности и определения местоположения BLE4.1 используется для точного позиционирования в реальном времени с лучшей точностью до 1 метра.
8) при условии, что окружающая среда является особенно сложной и условия ограничены, она все еще может найти восприятие диапазона и цель Блокировка азимута на уровне региона.
9) поддерживает расположение опорных узлов для поддержки обнаружения сигнала интенсивности RSSI и преобразования диапазона для опорных узлов.
10) поддерживает карту импорта, свободно масштабирует и определяет место обзора и реализует вид местоположения в нескольких подробностях разрешения.
11) данные могут автоматически записываться и храниться в режиме реального времени.
12) Поддержка одновременной локализации нескольких мобильных узлов с максимальным количеством поддержки до 65536.
13) исходный код системы позиционирования, демонстрационное программное обеспечение хост-компьютера и контрольный план системы позиционирования прилагаются, чтобы облегчить пользователю выполнение двух разработок или интеграции системы.
14) мы можем продолжить разработку двух разработок в нижней части нашего исходного кода, расширить область расположения и создать несколько единиц размещения для достижения широкого диапазона покрытия местоположения.
1) Источник питания: блок питания DC3V (батарейный блок)
Мобильный узел DC3V источник питания (батарейный блок или кнопочный аккумулятор)
2) Потребляемая мощность: опорный узел <6ма (пик выбросов) /1uA (в режиме ожидания или в режиме ожидания)
Мобильный узел <12мА (пик передачи) /2uA (в режиме ожидания или в режиме ожидания)
3) Рабочая частота: ISM диапазон 2,400 ГГц-2,4853 ГГц
4) Режим работы: точное позиционирование (режим координат) или локальное позиционирование (восприятие диапазона).
5) расположение: место с одним местом, не превышающим 50*50 метров.
6) интервал обновления позиционирования (цикл): от 1 секунды до 10 секунд, автоматическая адаптация.
7) емкость системы: единое место (обычно 50 м * 50 м) с максимальной емкостью 65536 мобильных узлов.
8) интерфейс связи между мобильным узлом и терминалом: BLE4.1 (беспроводной протокол Bluetooth)
9) узел позиционирования (цель) скорость мобильного телефона: максимум 200 км/ч
10) Рабочая температура системы: - 40 ~ + 85 C
11) размер изделия:
Опорный узел: 38 мм * 37 мм
Мобильный узел: 45 мм * 55 мм
1,1Функциональное введение
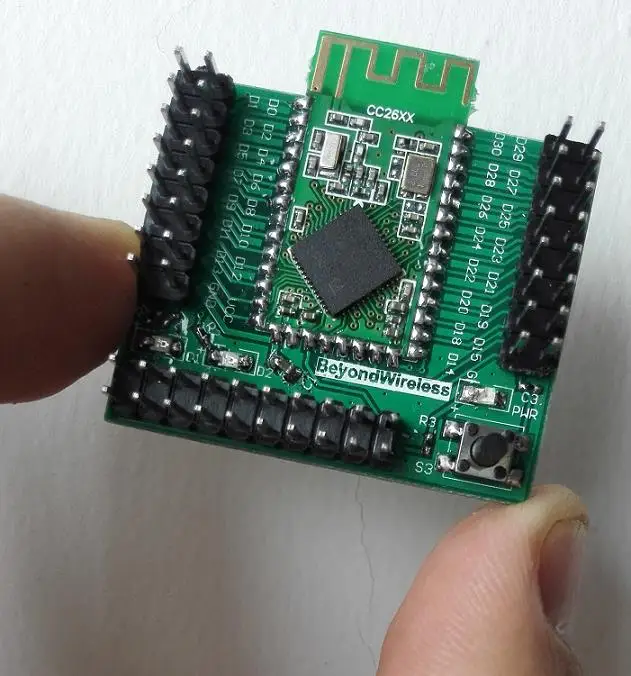
В справочном узле используется система Bluetooth BLE4.1 на чипе. Модуль узла-это высокопроизводительный промышленный дизайн, профессиональное качество, бортовое Микропатч-устройство, широкий диапазон температур, стабильный и надежный.
Мощность узла может управляться независимо. С полнофункциональным интерфейсом отладки моделирования, он может быть непосредственно загружен и отлажен; Основной интерфейс Функции ввода-вывода-все это легко, удобно для функциональной отладки, оценки тестирования и разработки продукта; Без какого-либо пола, Он может быть использован как независимая BLE4.1/CC26xx development board и идеально интегрирован в BLE system development kit нашей компании, и может быть быстро запущен в работу. Чэн кайфа.
Плата разработки опорного узла в основном состоит из чипа BLE4.1 CC2640 и связанных с ними периферийных схем и микрополосных антенн. Как показано на следующем рисунке:

A) Источник питания обеспечивается через батарейный блок, и контрольный узел может использоваться независимо.
B) все интерфейсные ресурсы микросхемы CC2640 на плате разработки узлов приведены для отладки и разработки.
В) на панели разработки есть 2 светодиодных индикатора и 1 кнопка, которые могут тестировать и разрабатывать функцию ввода и вывода порта ввода/вывода cc2640.
D) плата разработки обеспечивает интерфейс отладки, который может сотрудничать с нашей компанией. Xds100v3в среде разработки IAR или TI, эмулятор Отлаживает CC26xx онлайн и записывает прошивку программы.
E) и companysxds100v3emulator matching, беспроводной перехват воздушных данных (функция Sniffer).
1,2Описание ресурса разработки отладки
Контакты интерфейса на узле определяются следующим образом:

1,3Спецификация технических параметров
Технические параметры узла следующие:
|
Параметр |
Производительность |
|
Рабочая частота |
2,400 ~ 2,485 ГГц |
|
Расстояние связи |
150 метров |
|
Максимальный ток излучения |
Менее 9,1 мА |
|
Максимальная мощность излучения |
5 дБм |
|
Чувствительность |
-97dBm/1 Мбит/с |
|
Номер канала |
32 |
|
Скорость передачи данных по воздуху |
250K/500K/1M/2M бит/с |
|
Флэш-память |
128K байт |
|
Память SRAM |
8K байт |
|
Напряжение источника питания |
1,8 ~ 3,8 V |
|
Интерфейс источника питания |
2,54 мм расстояние шарнирное соединение |
|
Рабочий индикатор |
(DIO_0 / DIO_7) |
|
Ключ |
(DIO_19) |
|
ЖК-экран |
Oled-экран 128*64 (выбор) |
|
Интерфейс моделирования/загрузки |
Полнофункциональное моделирование/интерфейс загрузки |
|
Отлаживает интерфейс IO |
(DIO_1 / DIO_0) (DIO_30 / DIO_29) (DIO_3 / DIO_2) (DIO_28 / DIO_27) (DIO_5 / DIO_4) (DIO_26 / DIO_25) (DIO_7 / DIO_6) (DIO_24 / DIO_23) (DIO_9 / DIO_8) (DIO_22 / DIO_21) (DIO_11 / DIO_10) (DIO_20 / DIO_19) (DIO_13 / DIO_12) (DIO_18 / DIO_15) (GND-VCC3V3) (DIO_14 / GND) |
|
Толщина пластины |
1,6 мм |
|
Антенна |
На плате PCB высокопроизводительная антенна |
|
Инкапсуляция устройства |
Высокая плотность и малый объем поверхностного монтажа SMD |
|
Размер модуля |
38*37 мм (длина * ширина) |
|
Режим использования |
Может использоваться в качестве автономной доски для разработки Нет необходимости в любом полу Прямое использование загрузки и отладки Также может быть расширен и переработан |
2,1Функциональное введение
Мобильный узел оснащен системой Bluetooth BLE4.1 на чипе. Модуль узла-это высокопроизводительный промышленный дизайн, профессиональное качество, бортовое Микропатч-устройство, широкий диапазон температур, стабильный и надежный.
Мощность узла может управляться независимо. С полнофункциональным интерфейсом отладки моделирования, он может быть непосредственно загружен и отлажен; Основной интерфейс Функции ввода-вывода-все это легко, удобно для функциональной отладки, оценки тестирования и разработки продукта; Без какого-либо пола, Он может быть использован как независимая BLE4.1/CC26xx development board и идеально интегрирован в BLE system development kit нашей компании, и может быть быстро запущен в работу. Чэн кайфа.
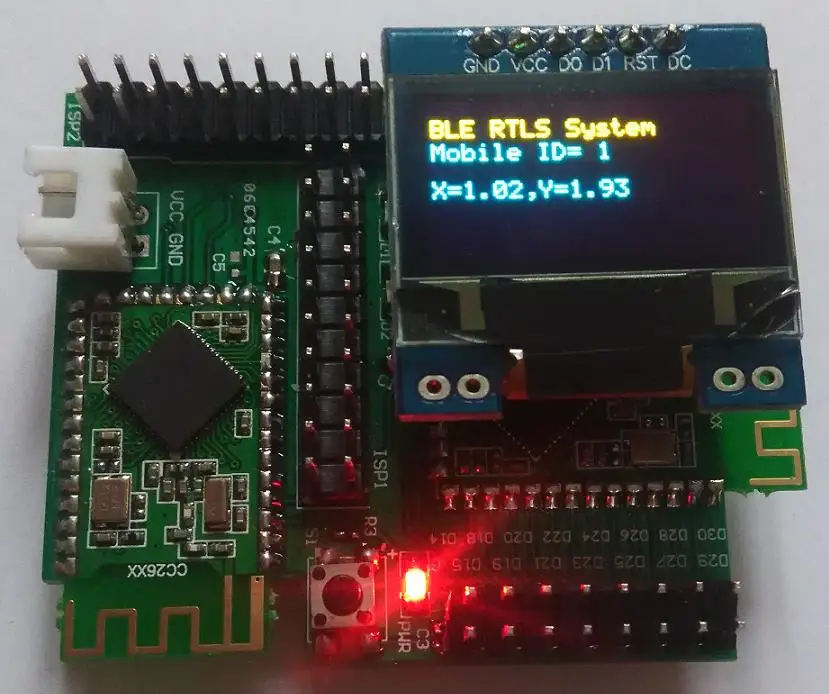
Плата разработки мобильного узла в основном состоит из чипа BLE4.1 CC2640 и связанных с ними периферийных цепей и микрополосных антенн. Включает в себя
A) плата разработки мобильной платы имеет две чипы CC2640, работающие вместе, и два интерфейса отладки оснащены соответствующим образом.
Б)Его можно использовать независимо. Источник питания обеспечивается через батарейный блок (загружен двумя батареями пять), а кнопочный Аккумулятор Устанавливается на задней части узла для обеспечения источника питания.
В) все интерфейсные ресурсы микросхемы CC2640 на плате разработки узлов приведены для отладки и разработки.
D) на панели разработки есть 2 светодиодный индикатор и 1 кнопка, которые могут протестировать и разработать функцию ввода-вывода порта ввода/вывода cc2640.
E) плата разработки имеет гнездо ЖК-экрана (опционально 128*64 OLED ЖК-экран).
F) плата разработки обеспечивает интерфейс отладки, который может сотрудничать с нашей компанией. Xds100v3в среде разработки IAR или TI, эмулятор отладки CC26xx онлайн и запись прошивки программы.
G) и companysxds100v3emulator matching, беспроводной перехват воздушных данных (функция Sniffer).
Как показано на следующем рисунке:

2,2Описание ресурса разработки отладки
Контакты интерфейса на узле определяются следующим образом.

Плата содержит два чипа CC26xx, A и B и оснащена двумя интерфейсами отладки DebuggerA и DebuggerB.
Демонстрационное программное обеспечение системы позиционирования является блолокатом, который хранится в папке данных разработки пользователя.
Конкретные этапы работы демонстрационного программного обеспечения:
Индивидуальная ссылка node1234A.

BLE.

BLEMobile nodeOLEDLCD экран
Батарейный блок

CR2032

После включения питания, мобильный узел инициализирован. После окончания, ЖК-экран подсказки: "RTLS инициализирован ОК!"

После того, как контрольный узел и мобильный узел находятся на питании, Тестовая система позиционирования подключена к норме. Необходимо провести тест на позиционирование связи для обеспечения нормального расположения требуемого канала радиочастотного сигнала.
Нажмите и отпустите ключ S на мобильном узле и посмотрите светильник LED1 на узле. В это время мобильный узел начинает поиск всех опорных узлов в системе, таких как нижняя подсказка ЖК-экрана: «Открытие...».

Через несколько секунд Ожидания Лампа LED1 погаснет, что означает, что поиск завершен, например, следующий ЖК-дисплей: «устройства нашли 4», что указывает на поиск четырех опорных узлов.

Когда количество опорных узлов меньше 4, система не войдет в процесс последующей локализации и дождется инструкции повторного поиска.
Когда количество опорных узлов не менее 4, система автоматически войдет в процесс последующей локализации. Далее будет замечено, что огни LED2 мобильного узла будут мигать поочередно, а огни LED1 четырех опорных узлов также Будут опрошены в свою очередь. Когда мобильный узел успешно завершит свое местоположение, его информация о местоположении будет отображаться в режиме реального времени на ЖК-экране, что указывает на то, что тест на подключение к местоположению успешен.

Мы можем дополнительно использовать мобильный терминал BLE (смартфон, планшет и т. Д.) для подключения к мобильным узлам для просмотра информации о позиционировании или графического отображения результатов позиционирования, как указано в инструкции по эксплуатации четвертого раздела.
Установите программное обеспечение blolocate.apk на мобильном телефоне Android и включите функцию Bluetooth. Обратите внимание, что только система Android 4,3 и версия выше могут поддерживать функцию позиционирования BLE.

После установки запустите демонстрационное программное обеспечение blolocate на телефоне.
5,1СканированиеBLE
После запуска демонстрационного программного обеспечения blolocate он автоматически сканирует все мобильные узлы BLE и отображает соответствующую информацию на интерфейсе.

Мобильный узел на изображении выше-«BLE moble_node 1», а блок информации об обнаружении для каждого мобильного узла в основном включает MAC-адрес узла и полученную интенсивность сигнала RSSI. Справочный узел-«другое устройство».
Нажмите на информационную область мобильного узла, чтобы войти в интерфейс отображения информации о местоположении узла.
5,2Операция инициализации местоположения
Нажмите и отпустите клавишу S на мобильном узле и посмотрите светильник LED1 на узле. В это время мобильный узел начинает поиск всех опорных узлов в системе, а в окне подсказки демонстрационного интерфейса информации о позиционировании есть следующая подсказка: «Открытие...».

Через несколько секунд лампа LED1 будет погашена, что указывает на то, что поиск завершен, а в окне запроса на информацию о местоположении на демонстрационном интерфейсе появится запрос на «устройства нашли 4», что указывает на поиск четырех опорных узлов.

Когда количество опорных узлов меньше 4, система не войдет в процесс последующей локализации и дождется инструкции повторного поиска.
Когда количество опорных узлов не менее 4, система автоматически войдет в процесс последующей локализации. Далее будет замечено, что огни LED2 мобильного узла будут мигать поочередно, а огни LED1 четырех опорных узлов также Будут опрошены в свою очередь. После того, как каждый мобильный узел успешно завершит свое местоположение, информация о местоположении мобильного узла будет автоматически отображаться в окне подсказки интерфейса презентации информации о местоположении.
5,3Настройка параметров местоположения
1.) Установите координаты местоположения четырех опорных узлов.
В «наборе координат опорного узла» на демонстрационном интерфейсе информации о позиционировании значения координат положения четырех опорных узлов, x, y соответствуют фактическому положению. Конкретные инструкции по входу:
XY, X1, Y1, X2, Y2, X3, Y3, X4, Y4,
Среди них:
X1, Y1 является абсциссой и координатой опорного узла 1.
X2, Y2 является абсциссой и координатом опорного узла 2.
X3, Y3 является абсциссой и координатой опорного узла 3.
X4, Y4 является абсциссой и координатом опорного узла 4.
Нажмите кнопку «задать координаты опорного узла», чтобы установить информацию в окне запроса интерфейса презентации информации о позиционировании после настройки успеха.
2.) Настройка параметров радиочастоты системыAN
Параметры радиочастоты A и N RF калибровки являются входом к радиочастотному параметру сцены настройки на интерфейсе представления информации о позиционировании. За специальным методом калибровки следует содержание данного руководства.
Конкретные инструкции по входу:
RF, A, N,
Среди них:
A-это радиочастотный параметр сцены a.
N-это радиочастотный параметр сцены N.
Нажмите кнопку «Настройка параметров сцены RF», чтобы установить информацию в окне запроса интерфейса презентации информации о позиционировании после настройки успеха. Если вы хотите разработать местоположение в фактическом сценария, вам нужно работать в соответствии с методом калибровки радиочастоты в четвертой главе руководства.

5,4Отображение информации о координатах местоположения мобильного узла
После завершения инициализации местоположения и настройки параметров система автоматически отображает информацию о координатах положения, полученную с помощью аппаратного обеспечения мобильного узла, которая отображается в окне подсказки демонстрационного интерфейса информации о местоположении, следующим образом:

5,5Графический дисплей результатов позиционирования
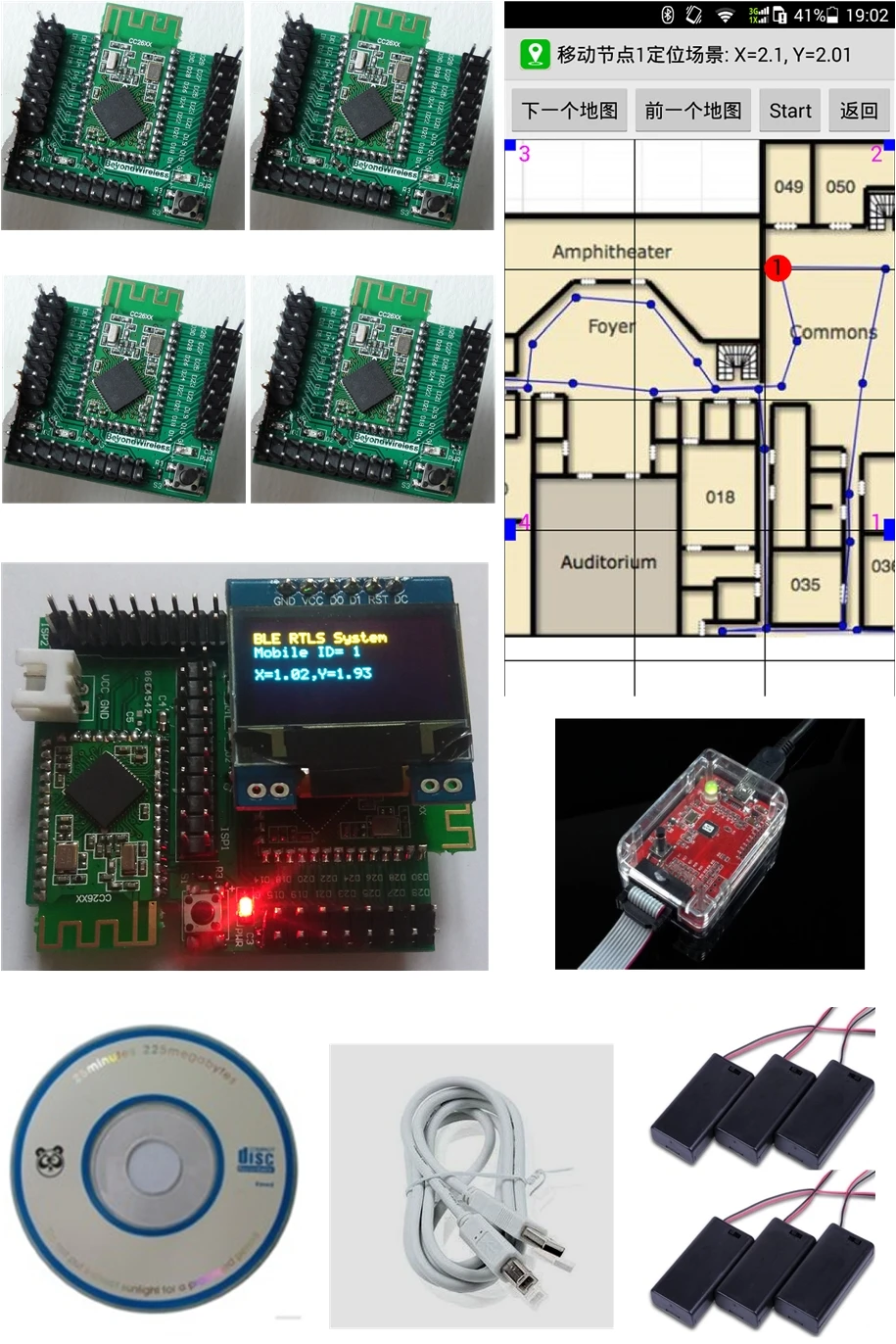
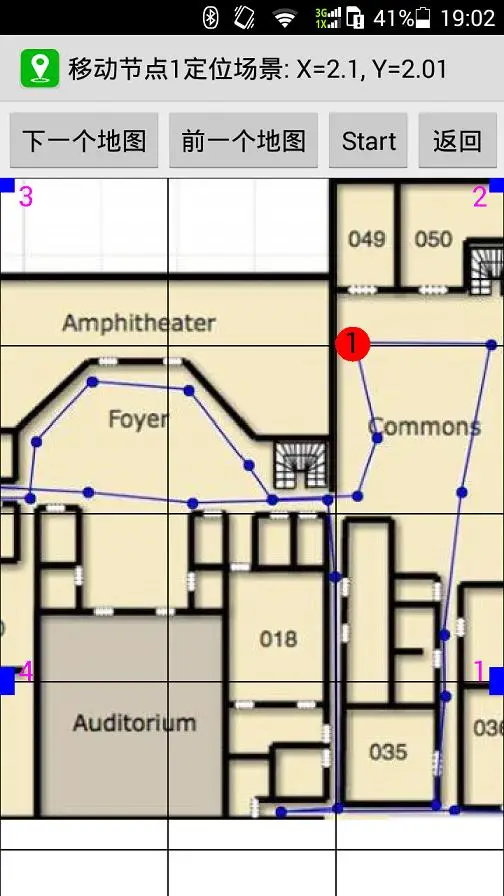
Нажмите кнопку «сцена», чтобы войти в графический интерфейс управления демонстрацией позиционирования. В это время карта будет импортирована в интерфейс, и красная движущаяся точка появится на карте, чтобы показать местоположение мобильного узла относительно четырех опорных узлов. Четыре синих квадрата представляют собой 4 опорных узла, а расстояние между серыми сетками составляет 1 метр. В то же время в верхней части интерфейса показаны координаты местоположения на текущий мобильный телефон.



Примечание: файл карты поддерживает три типа BMP, JPG или GIF. Пользователь хранится в каталоге загрузки карты памяти по умолчанию в этом мобильном телефоне, например, местоположение мобильный телефон в каталоге «/хранение/sdcard0/загрузка».
Интерфейс поддерживает мультисенсорную работу. Если вам нужно увеличить изображение сцены и осуществить обзор местоположения в различных подробностях разрешения, вы можете использовать мультитач режим для увеличения/уменьшения карты на интерфейсе, или перемещайте вверх и вниз по карте, и пользователь может испытать это сам по себе.
Список доставки:
1.Список оборудования:
|
Серийный номер |
Название |
Номер |
Объяснение |
|
1. |
BLE |
4.Индивидуальный |
На основе BluetoothBLE4.1Контрольный узел, отладка модуляIOИнтерфейс Все просвечивается.ОтладкаЗагрузите интерфейс. Модуль оснащенСветодиодныйЛампа, кнопка, жидкокристаллический экран розетка (опционально128*64AOLEDЖК-экран), используйте батарейный блок (загружен в две секции)5Аккумулятор) источник питания. |
|
2. |
BLE |
1.Индивидуальный |
На основе BluetoothBLE4.1Мобильный тестовый узел используется как целевой узел, расположенный в системе позиционирования, и модуль отлажен.IOИнтерфейс Все просвечивается.ОтладкаЗагрузите интерфейс. Модуль оснащенСветодиодныйЛампа, кнопка, жидкокристаллический экран розетка (опционально128*64OLEDЖК-экран), используйте батарейный блок (загружен в две секции)5Аккумулятор) Источник питания или одинCR2032Кнопка питания аккумулятора. |
|
3. |
Симулятор |
1.Платформа |
Xds100v3Симулятор используется для отладки и разработки опорных узлов, мобильных узлов, анализа протоколов, моделирования и загрузки программ. |
|
4. |
|
5Индивидуальный |
Возьмите переключатель и загрузите две батареи пять. Для целейBLEМощность опорного узла и мобильного узла. |
|
5 |
USBЛиния передачи данных |
1.Полоса |
При использовании эмулятора он используется для подключения компьютера и эмулятора для отладки или загрузки прошивки. |
|
6 |
OLED |
1. |
128*64В сочетании с мобильными узлами отображается информация о местоположении. |
|
7 |
CD-ROM |
1.Чжан |
Содержит новейшее программное обеспечение для локализации, исходный код и Пояснительную информацию. |
2.
Смотрите так же другие товары:






