
Contemptor Дредноут КНО (кулак) w/Heavy Botter|Наборы для сборки моделей| |
704,61 руб.


Новое поступление
Характеристики
*Текущая стоимость 875,51 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Feb-18-2026 | 1111.80 руб. | 1133.94 руб. | 1122 руб. |
| Jan-18-2026 | 901.18 руб. | 919.97 руб. | 910 руб. |
| Dec-18-2025 | 1094.71 руб. | 1116.59 руб. | 1105 руб. |
| Nov-18-2025 | 1085.36 руб. | 1107.78 руб. | 1096 руб. |
| Oct-18-2025 | 866.89 руб. | 883.69 руб. | 874.5 руб. |
| Sep-18-2025 | 1068.89 руб. | 1089.19 руб. | 1078.5 руб. |
| Aug-18-2025 | 1059.45 руб. | 1080.91 руб. | 1069.5 руб. |
| Jul-18-2025 | 1050.10 руб. | 1071.86 руб. | 1060.5 руб. |
Описание товара







Научный принцип: механическое движение
Размер модели: 150 мм * 200 мм * 80 мм
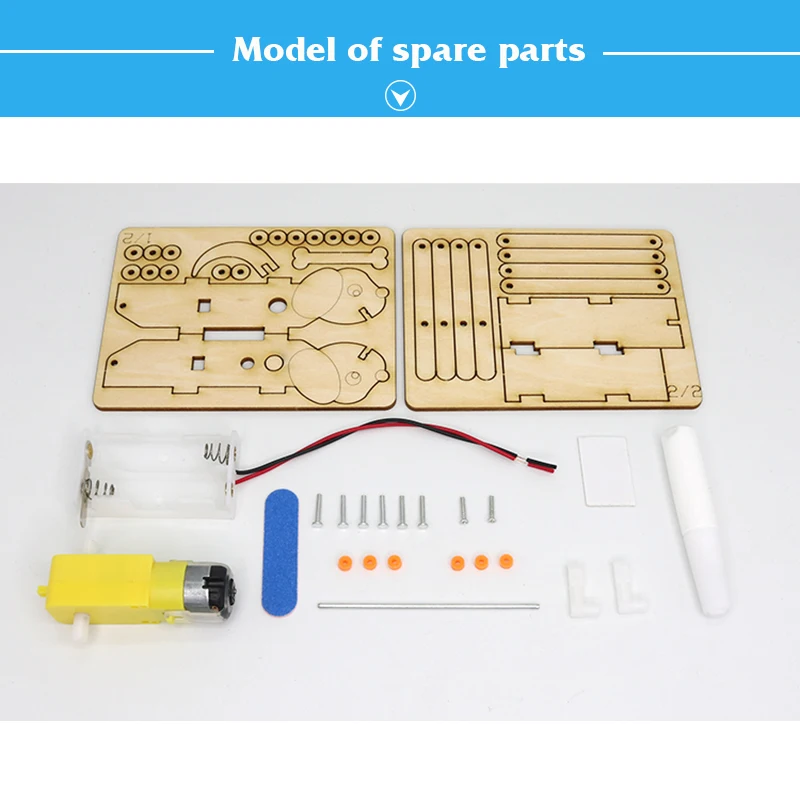
Самостоятельные аксессуары: Нет
Описание продукта: используя принцип кривошипно-звенного механизма, роторное движение редукторного двигателя преобразуется в многократное колебание motion, и gait law животного имитируется через соединительную структуру.




Смотрите так же другие товары:






